February 3, 2016, was the third of our four introductory meetings for the project. This meeting had three objectives: 1) Fix KEN, 2) Master face recognition, and 3) Design new conversations.
Since the ECPI demo the previous day had suffered from a breakdown in one of KEN’s Raspberry Pi computers, we assigned a team to investigate the root cause. They determined that the cause was a faulty micro-USB power plug. Great job, team!
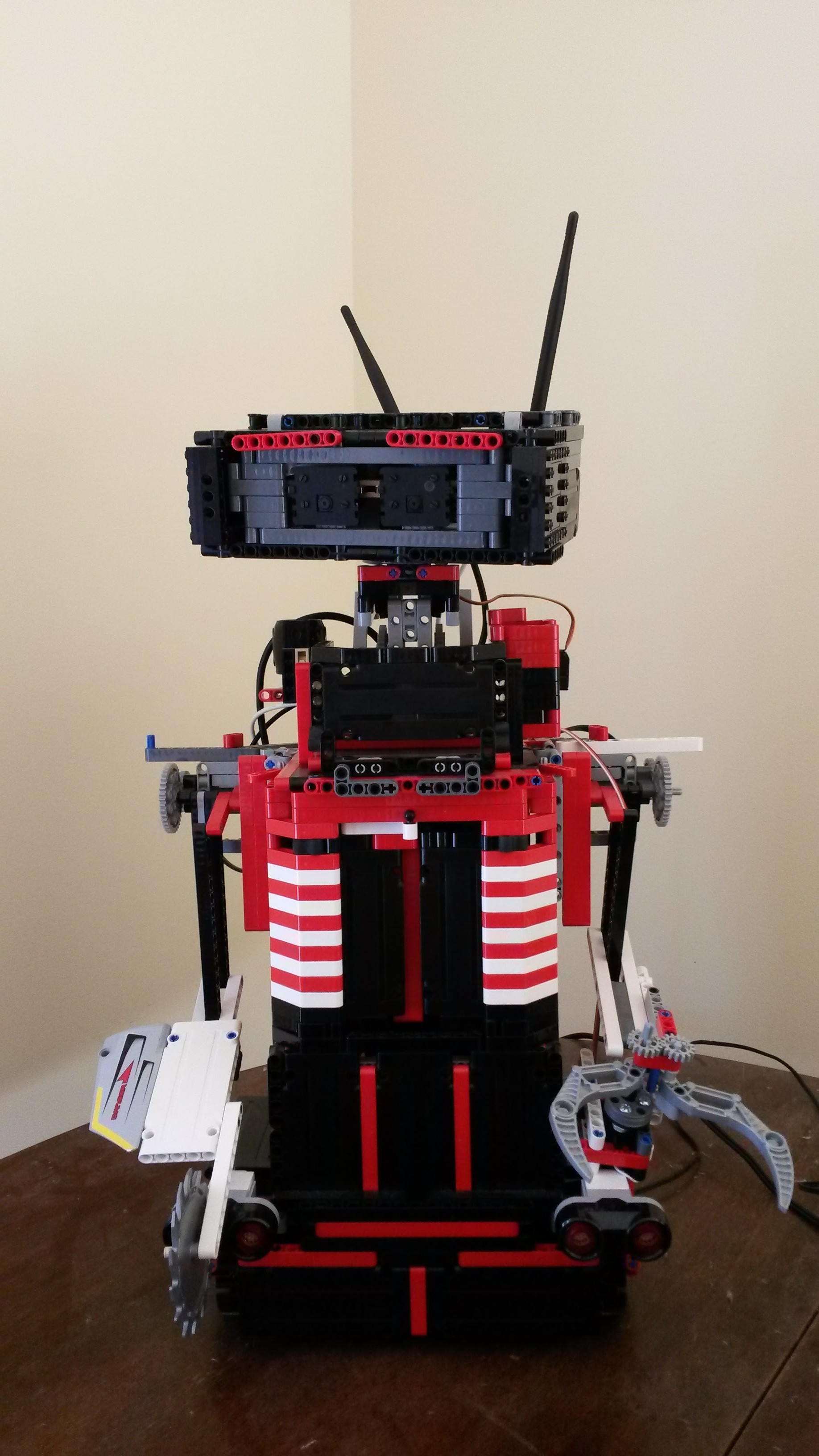
Face recognition is one of the features of the robot which is really cool, but can be hard to demonstrate, because it is sensitive to a variety of conditions. The goal of this activity was to help the team become comfortable with this feature and learn how to demonstrate it. We set the goal of getting the robot to recognize everyone in the group. Since KEN was tied up with the repair team, KEN’s Uncle Ross (the LEGO predecessor prototype to KEN) was brought in to help.
We attempted face recognition with two team members before it was clear that something is wrong with the algorithm as currently implemented, because it was already getting confused. We talked briefly about how the algorithm matches faces, but concluded that some bug investigation is needed to find out why it wasn’t working correctly.
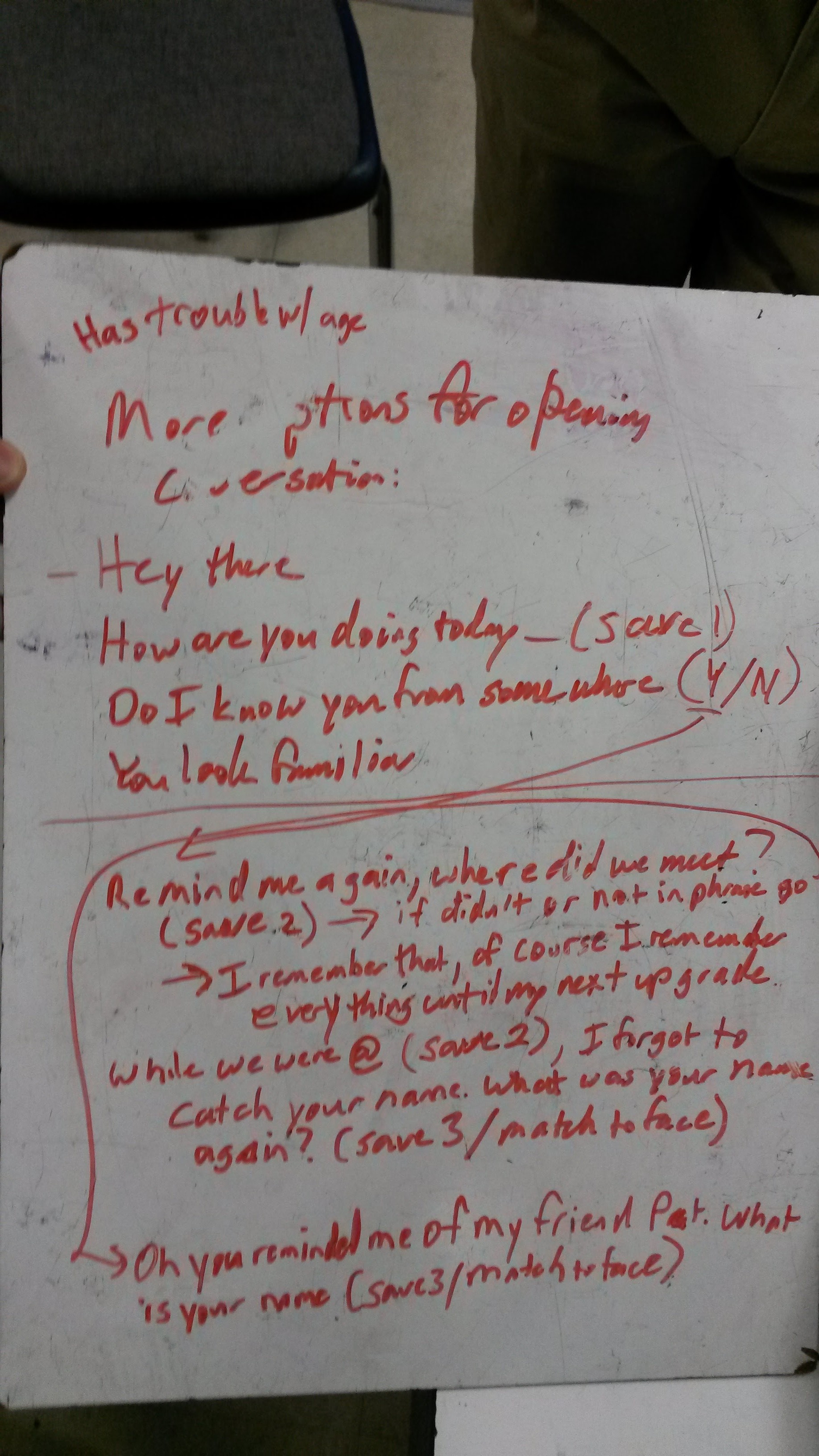
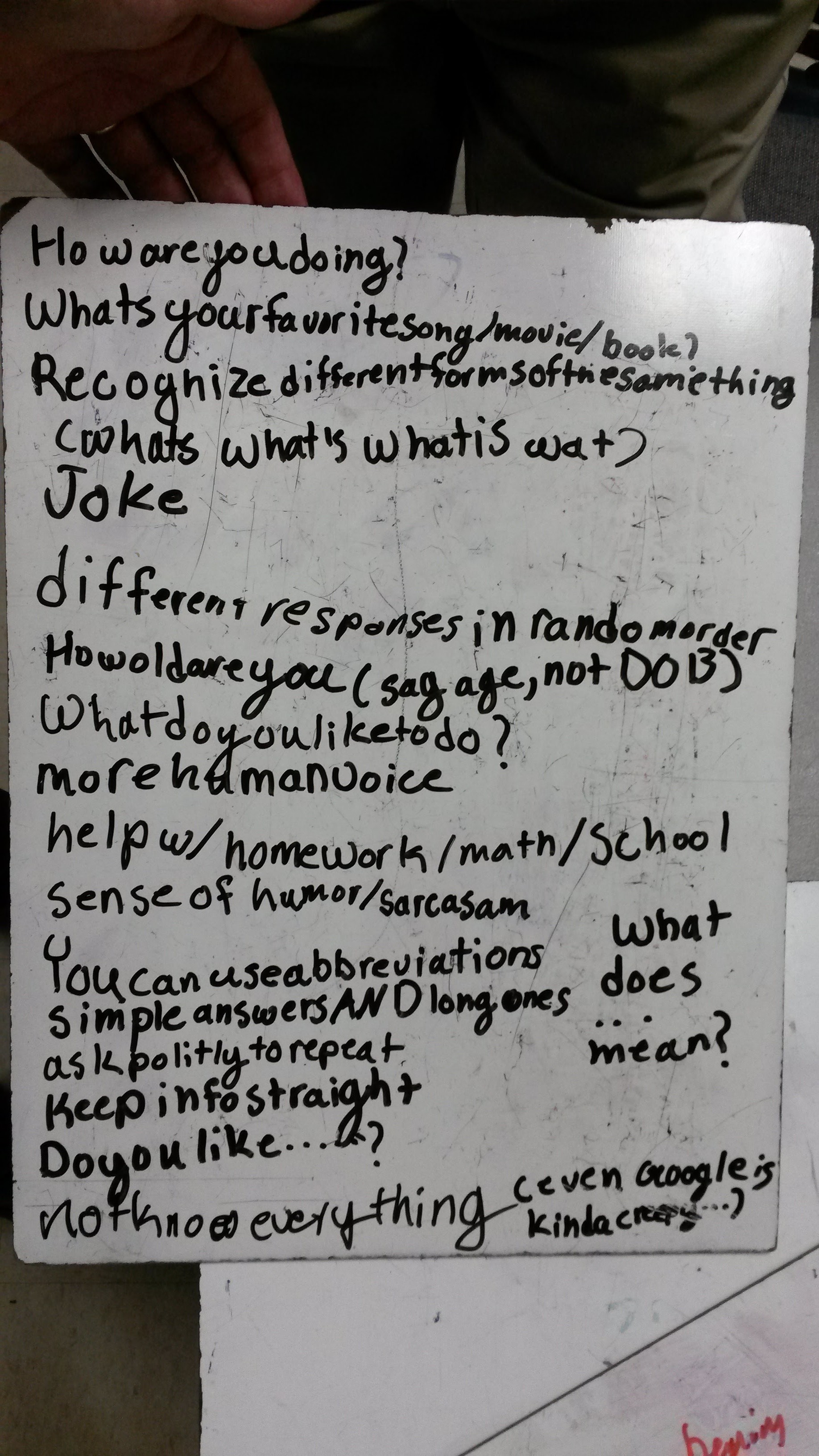
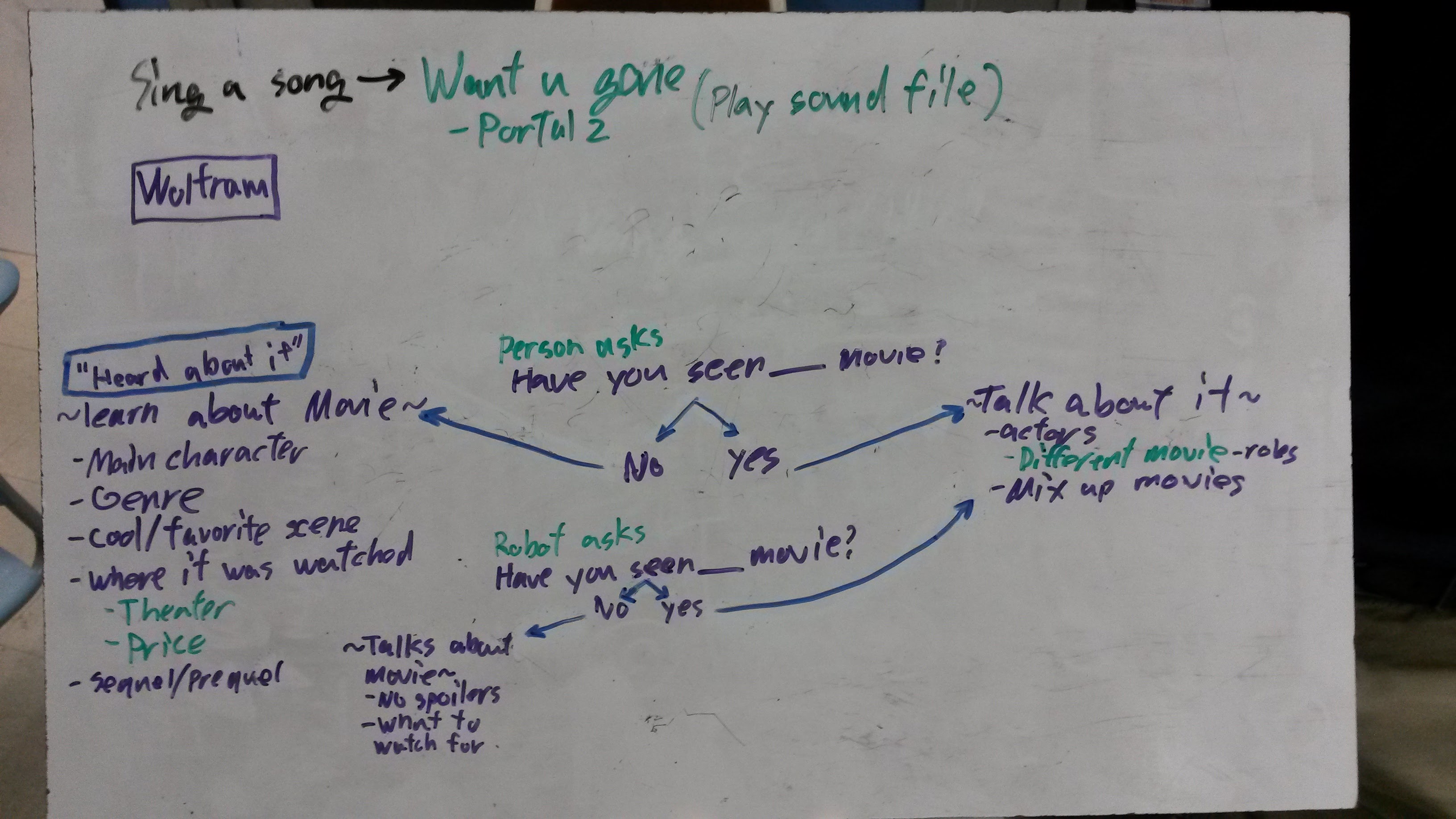
The final activity was to design new conversations for KEN. Everyone had experienced some of the awkward things KEN will say, so this was a chance to define how KEN should respond. The goal was to take these ideas and then show how they can be coded into the system. To support this, we had three systems set up to run KEN’s AI system. This way small teams could test out how KEN currently responds while thinking of improvements. Many good ideas were captured, and we got to see a little preview of how these ideas can be translated into code.