This was the last of our four week open meeting period. To make progress on the project, we need team members to commit for a few months, so we can have consistency from week to week. Although we were still missing some potential contributors from the FIRST Robotics Competition team, who are very busy with their FRC build season, it was clear that those who attended were dedicated to making this project a success.
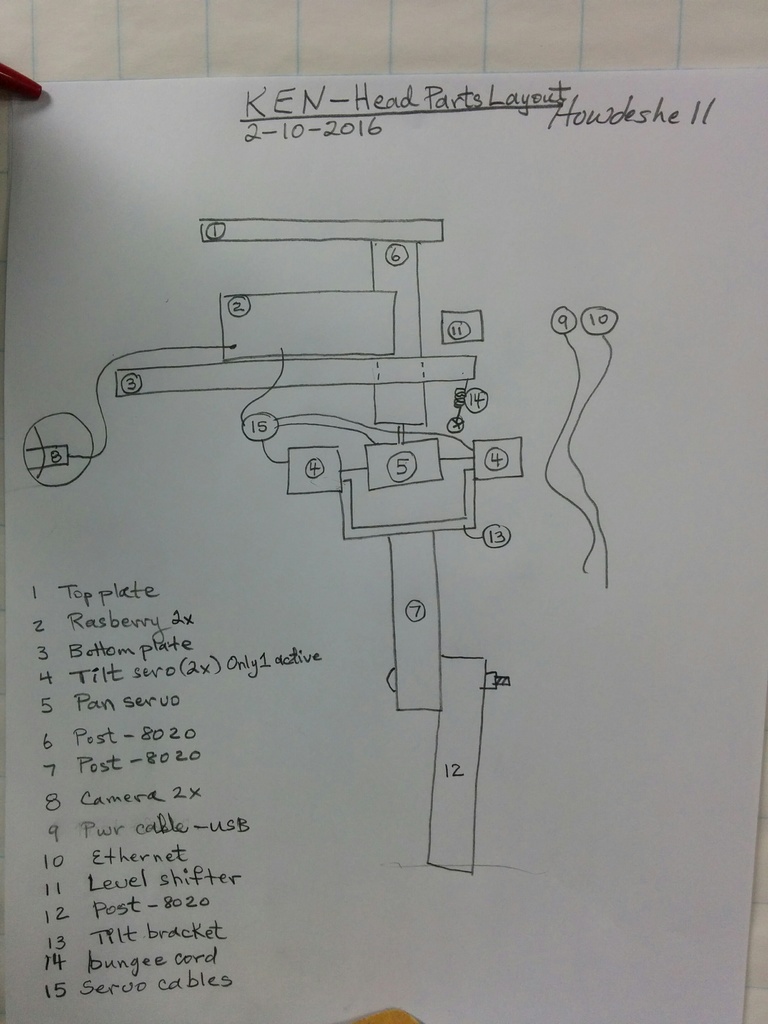
We worked on three fronts during this meeting: Physical, software, and personality. The team members most interested in the sculpture, mechanism, and central nervous system worked to catalog KEN’s parts. To build a new robot, we need to know what to purchase based on what is already in KEN. A talented member of the team drew a detailed diagram of KEN’s neck mechanism.
Another group of team members interested in the software and intelligence experimented with enhancements to the face recognition software. In the Feb 3 meeting, the face recognition software was shown to be broken. Investigation was done during the week to identify the cause. Some speculative enhancements were removed and some parameters adjusted to get the system working better. Testing at the meeting showed that performance was improved, but still not good enough. Two brothers were confused (they look similar, but not identical). Two unrelated students were incorrectly linked as the same identity. One student was not successfully recognized. More work is needed to improve the algorithm further.
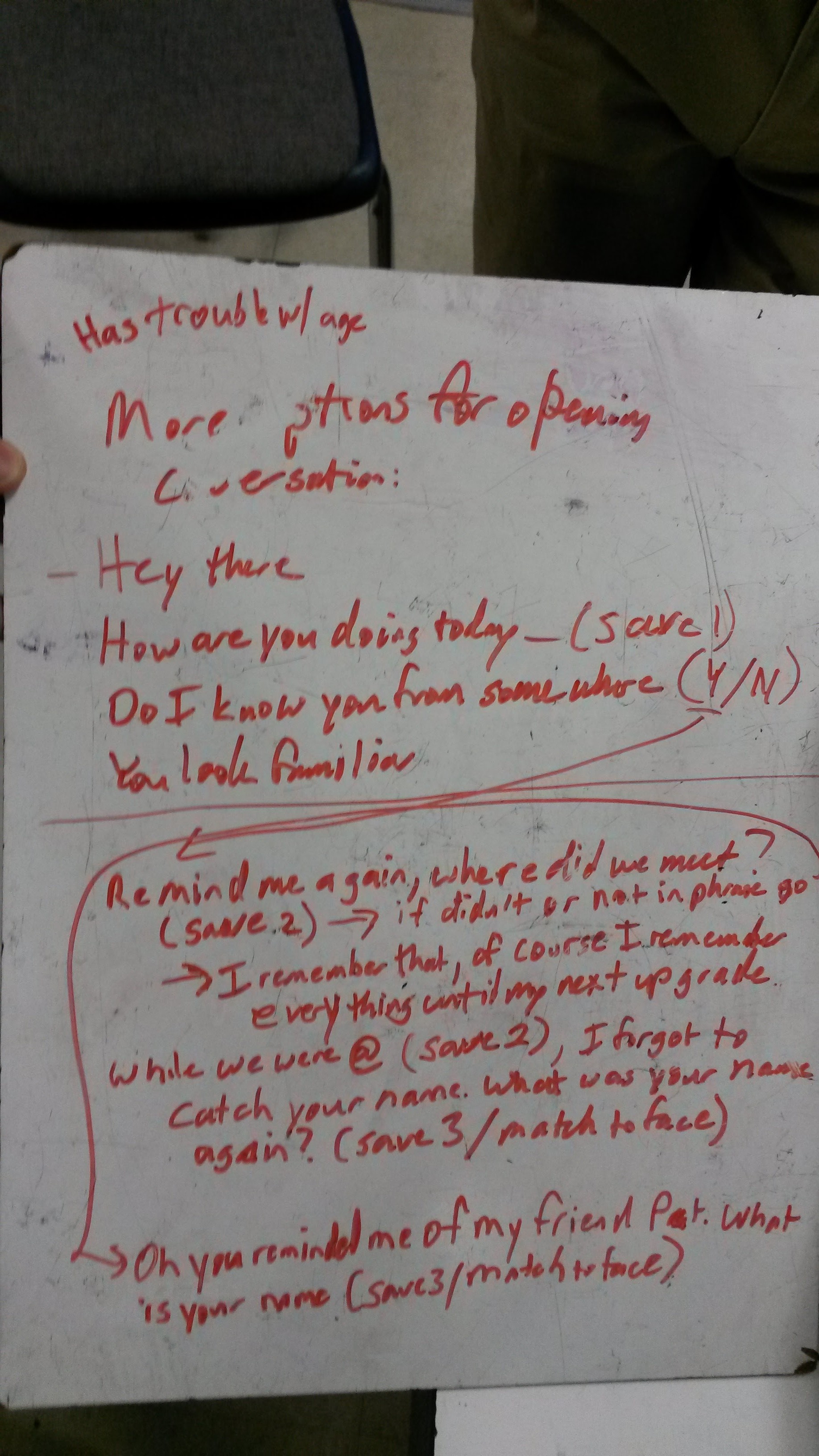
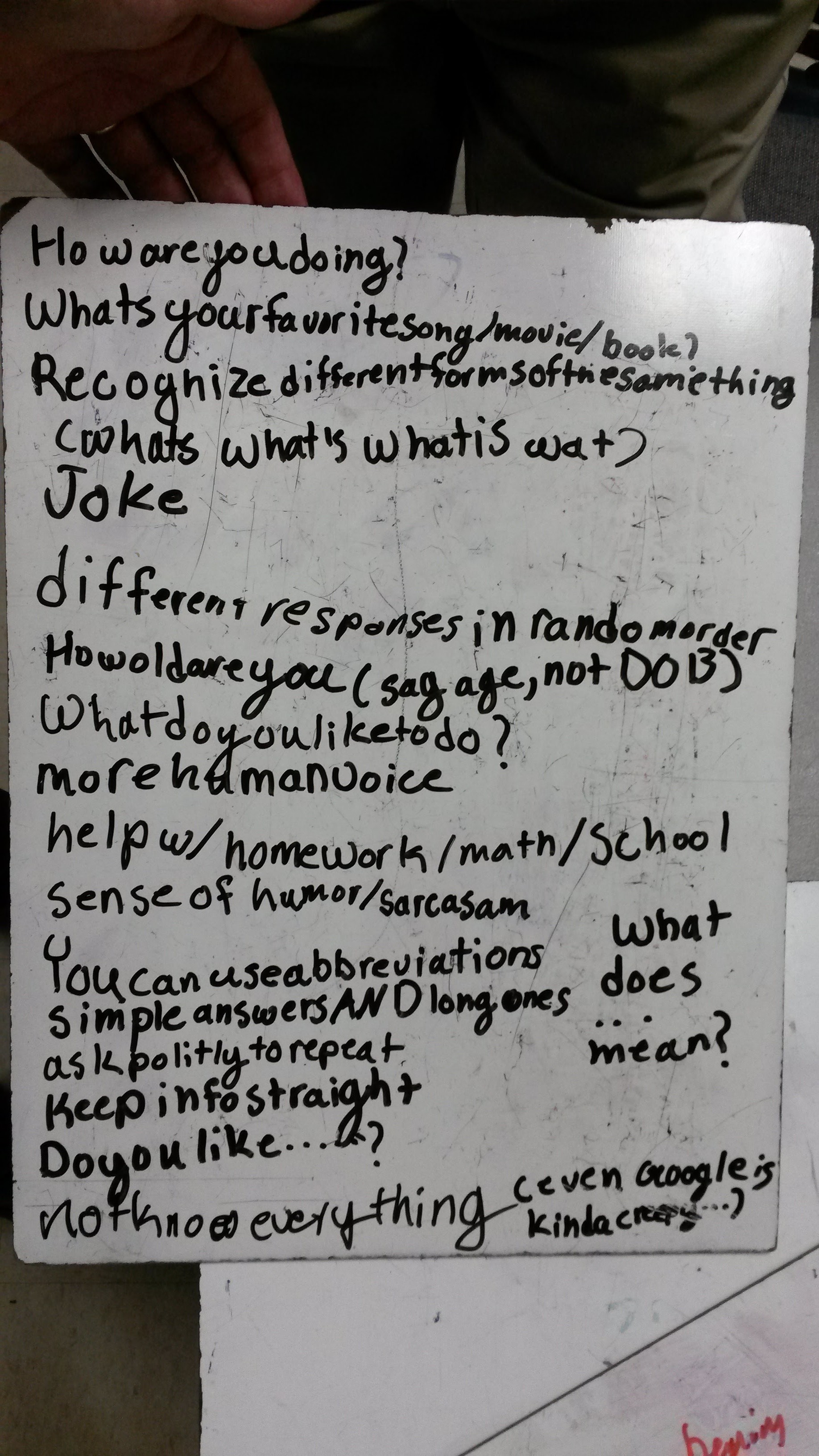
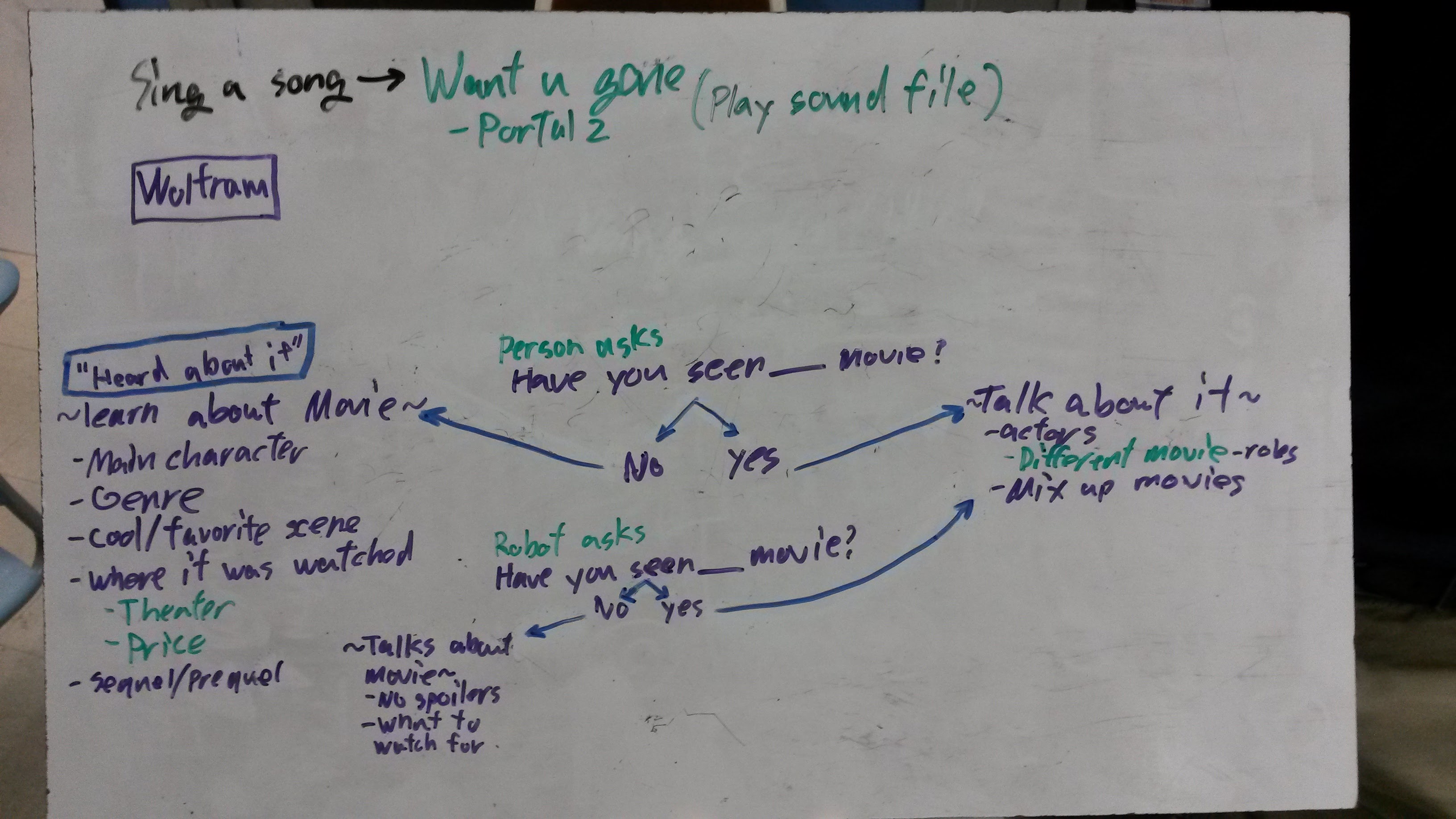
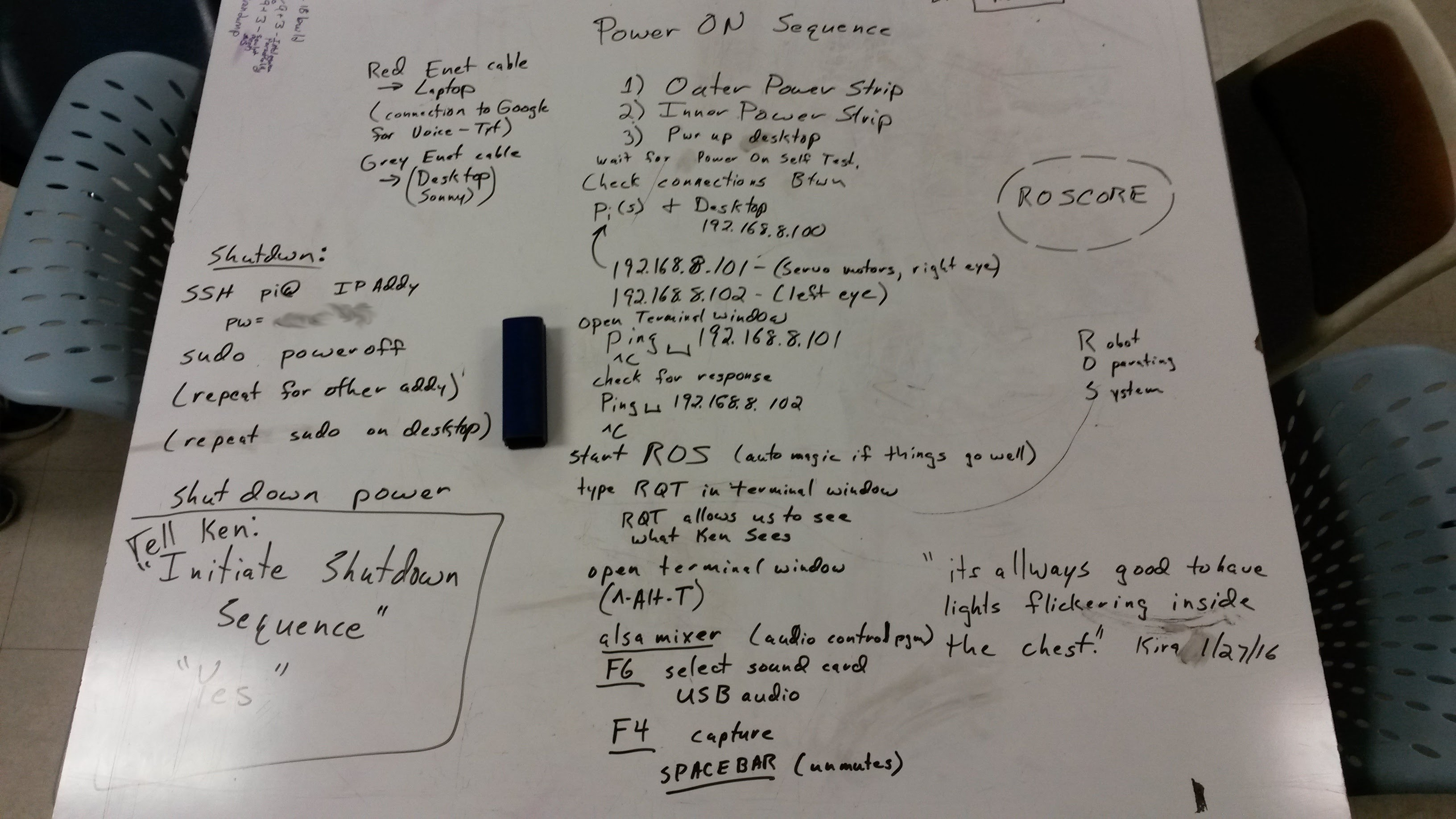
The final group worked on learning the mechanism to define KEN’s personality. Three computers were set up with KEN’s conversation software. The team members were shown how to log into the computers and edit the AIML files to define how KEN responds. Because of time constraints, we didn’t get very far with implementing new conversations. That will be an ongoing activity.