A team of IEEE student members, comprised of electrical engineers and mechatronic engineers, are building a robotic mouse capable of navigating a maze autonomously.
Project Description:
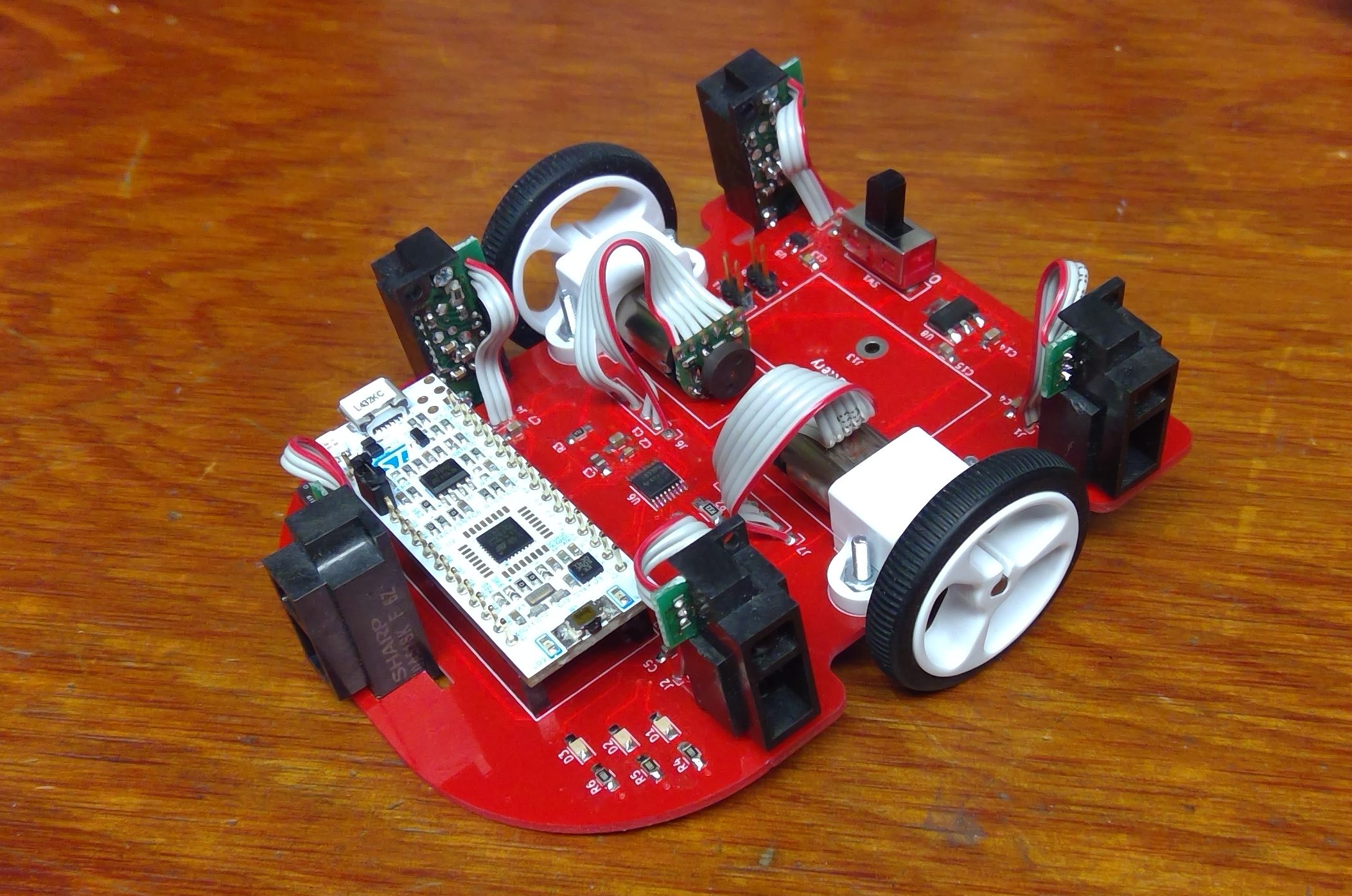
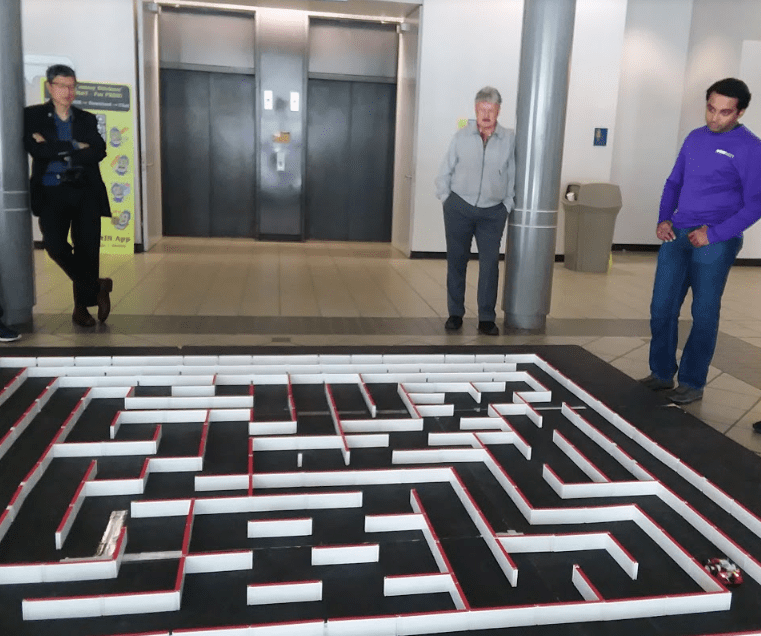
The project consists of an autonomous robot which solves a randomized constructed 16 x 16 maze. The robot must remember its starting position, navigate through the maze, find the center of the maze, and return back to its home location in the fastest time possible.
The autonomous robot consists of various systems, sensors, motors, and algorithms to help it perform its task. Each of these systems work together to collectively create a larger complex system.
Competitions are held every year to showcase who has built the fastest robot. Last year the CSUC IEEE micromouse team ran its micromouse “RatBrain” robot at multiple competitions and won 1st place at the IEEE San Jose Micromouse Exhibition, 1st place at the IEEE Sacramento Micromouse Exhibition, and 3rd place at the Annual IEEE UCLA Competition.
We are currently looking for new members to continue the tradition of building new micromouse platforms and enhancing our existing robot for new features. We welcome new, transfer, and current students to join us to learn more about the micromouse project.
Micromouse Project Meetings
During our meetings we will have two groups of students working on different tasks. The 1st group will consist of students who are new to micromouse and wish to learn how the mechanics of how micromouse works. They will also be given micromouse trainer kits that are easy to learn and teach the basics of a micromouse platform.
The 2nd group will be for the updates of our micromouse competition robot. Students will learn how to advance their knowledge of building a micromouse platform from the ground up. They will also participate in contributing towards the various updates that must be implemented into the new design.
Micromouse Project Updates
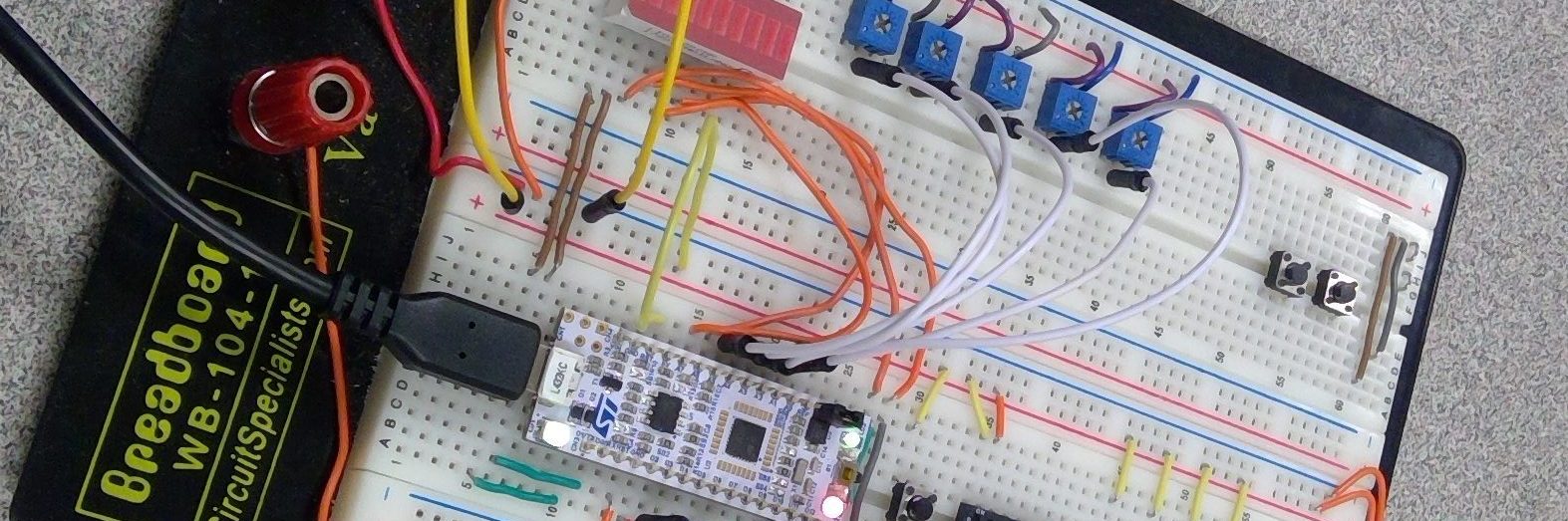
Currently, we are taking the original schematics of “RatBrain” design and translating it over to Altium’s CircuitMaker PCB software. Then, we will begin the process of importing design libraries, footprints, and parameters from the sophisticated online database. Once the schematic is complete we move on to PCB layout and verifying the electrical design. Finally, we will assemble the new micromouse robot and implement better algorithms in C via the Keil IDE.