
It has been a fairly busy week. On Friday the 1st, the Structure team met to decide on an approach for building the Dalek base. We settled on building a shell out of sheet metal, stabilized and reinforced by internal shelving and mounting hardware for the other components. The “foot” of the Dalek will serve as a mounting point for the drive module as well as an array of distance/obstacle sensors. For internal access (to batteries, computers and such), the “back” of the shell will be removable. We presented this plan to the rest of the group at tonight’s meeting, and got the thumbs-up to move forward. After taking measurements of the KEN robots, we got some scaling figures, and will be working on a mock-up for sizing the rest of the components in the coming weeks.
The Drive team continued their discussions tonight, and after reviewing several options, decided to focus on a 4x omniwheel-based holonomic system. We’ll be shopping around to get some idea of pricing, and then moving on to power and control questions.
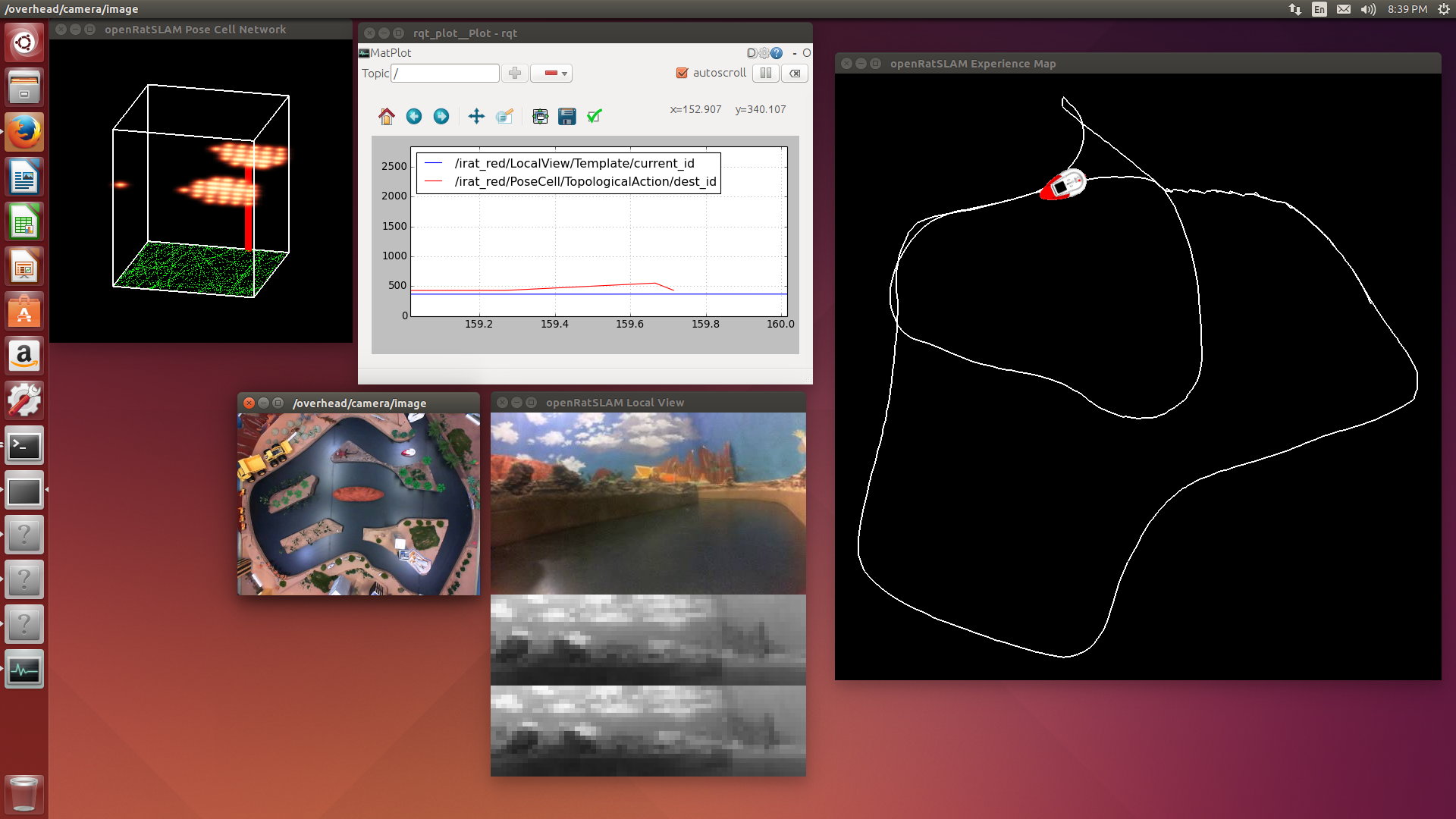
Wrapping up tonight’s meeting, the Software team made some exciting progress. After installing OpenRatSLAM on KEN4’s main computer, they were able to run it and observe the algorithm in action, albeit using prepackaged data.
That’s all for today. We made good progress, so I think we can sleep soundly knowing that our Dalek overlord will be pleased.